PROMI
Plateforme Robotique Modulaire sous IRM
Un programme R&D majeur porté par Tekceleo pour développer la première plateforme d'actionnement standardisée et compatible IRM — permettant aux MedTechs et chercheurs de concevoir des dispositifs et robots compatibles IRM plus rapidement, plus sûrement et à moindre coût.
 Cofinancé par
Cofinancé parl'Union européenne
FEDER / Région SUD
Pourquoi PROMI ?
L'IRM offre aux chirurgiens une imagerie des tissus mous en temps réel inégalée. Pourtant, les robots conventionnels — qui reposent sur des moteurs électromagnétiques et une électronique standard — sont fondamentalement incompatibles avec les champs magnétiques intenses d'un scanner IRM. Seuls des moteurs non-magnétiques compatibles IRM peuvent opérer en toute sécurité dans cet environnement.
Malgré des années de recherche académique, aucun robot chirurgical compatible IRM n'est disponible commercialement à ce jour. Le principal obstacle est l'absence d'une solution d'actionnement fiable et standardisée que l'industrie et les équipes de recherche puissent simplement intégrer.
C'est précisément ce que PROMI adresse : fournir une plateforme d'actionnement compatible IRM, prête à intégrer, construite sur les moteurs ultrasoniques piézoélectriques de Tekceleo — une brique technologique que les MedTechs et les chercheurs peuvent utiliser pour développer leurs propres dispositifs, sans reconstruire la technologie fondamentale de zéro.
Une plateforme d'actionnement clé en main pour la robotique compatible IRM
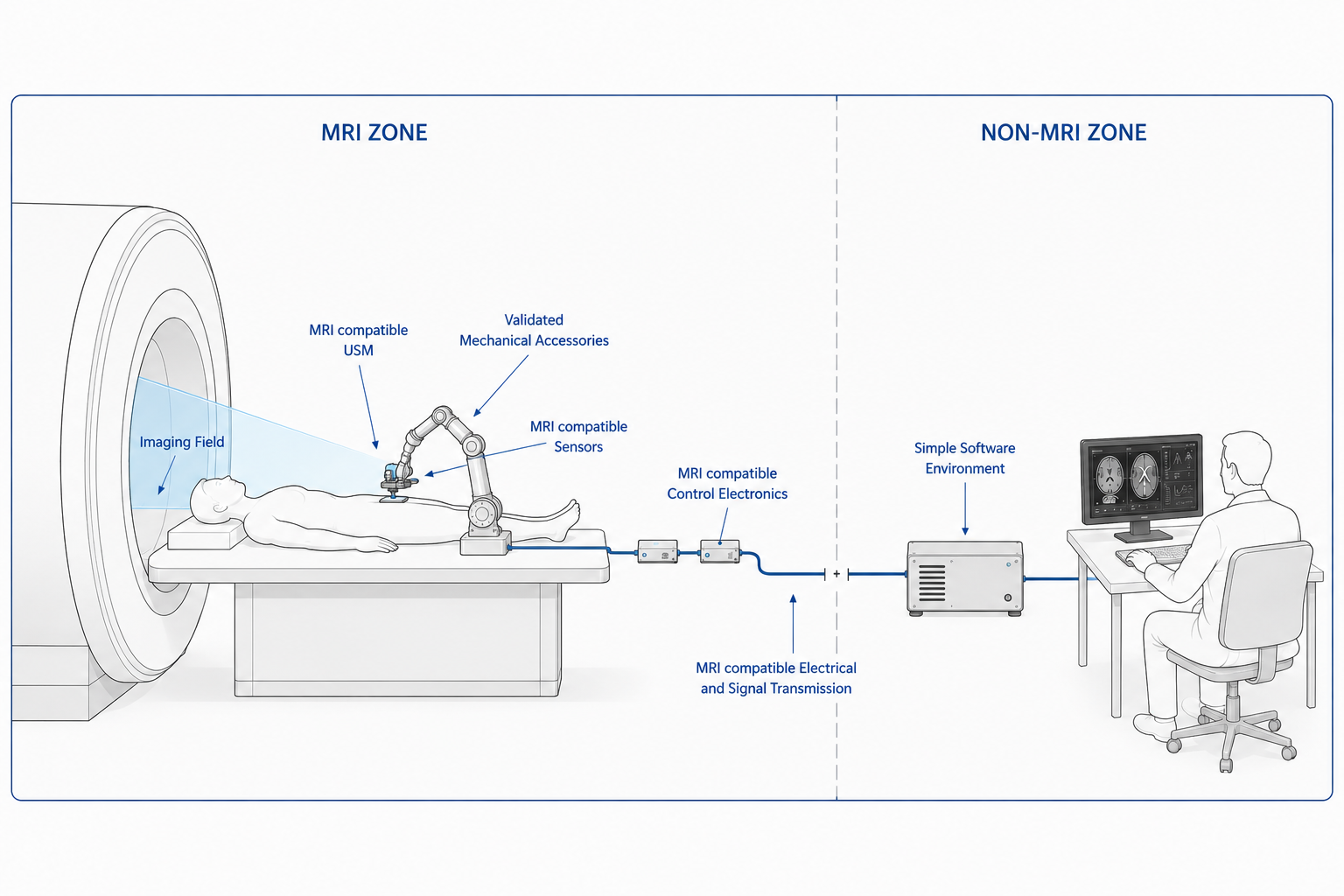
PROMI propose un écosystème d'actionnement complet et standardisé — des moteurs au logiciel — conçu dès le départ pour un fonctionnement sûr à l'intérieur des scanners IRM. Chaque composant est pensé pour la sécurité des matériaux, la transparence à l'imagerie et la compatibilité opérationnelle.
Transmission mécanique & accessoires
Chaque module PROMI est une unité mécanique autonome à 1 degré de liberté (DDL) — conçue pour être assemblée en systèmes robotiques multi-DDL (jusqu'à 3 DDL en standard, extensible à 6+) via des interfaces standardisées à connexion rapide. Les connexions mécaniques, électriques et logiques sont unifiées : combiner des modules ne nécessite pas de revalidation IRM complète. Tous les matériaux sont non-ferromagnétiques, transparents à l'imagerie et fabriqués par des procédés évolutifs (impression 3D, micro-moulage) pour une intégration compacte dans le tunnel de l'IRM.
Motorisation — Moteurs ultrasoniques à ondes progressives
La couche d'actionnement de PROMI repose sur les moteurs ultrasoniques de la série WLG développés par Tekceleo : des actionneurs rotatifs compacts (<80 mm de diamètre) délivrant jusqu'à 2 N·m de couple à des vitesses allant jusqu'à 350 tr/min — sans aucune interférence magnétique. Intrinsèquement compatibles IRM par conception, ces moteurs piézoélectriques offrent une précision et une répétabilité élevées, sans émissions électromagnétiques, sans composants ferromagnétiques et sans échauffement excessif. La conversion en mouvement linéaire et des solutions USM linéaires dédiées font également partie de la feuille de route.
→ Découvrir notre gamme de moteurs USMCapteurs — Contrôle en boucle fermée compatible IRM
Un retour d'information fiable est critique à l'intérieur d'un champ magnétique de 3T. PROMI intègre dans chaque module des capteurs de position, d'effort et de fin de course compatibles IRM — permettant un contrôle en boucle fermée avec suivi de position absolue, détection de collision et verrouillage mécanique. L'architecture est conçue pour supporter le retour haptique et des routines d'autotest autonomes pour chaque module, avec des modes d'erreur et de défaut intégrés conformes aux exigences de sécurité des dispositifs médicaux (IEC 60601-1).
Transmission électrique & des signaux
Opérer à l'intérieur d'un scanner IRM signifie que chaque câble est une antenne potentielle. La couche de transmission de PROMI utilise une distribution de puissance et de commande entièrement blindée et compatible IRM — combinant fibre optique, transmission passive et câblage conforme CEM pour éliminer les interférences RF et les artefacts d'imagerie. L'architecture minimise le nombre de câbles et supporte la calibration automatique au démarrage du système, garantissant l'intégrité du signal entre les modules d'actionnement dans le tunnel et l'électronique de commande à distance.
Électronique de commande — Résonante, sans transformateur
PROMI élimine tous les composants ferromagnétiques de la chaîne de contrôle moteur grâce à une architecture électronique résonante propriétaire sans transformateur. Cela permet à l'électronique de commande de fonctionner en toute sécurité à proximité immédiate — voire à l'intérieur — du scanner IRM, réduisant la longueur des câbles, la latence et le besoin d'enceintes blindées encombrantes. Le module de contrôle/commande offre une répartition claire et optimisée entre électroniques embarquées et déportées, permettant la coordination multi-DDL pour des systèmes robotiques de 3+ degrés de liberté.
Environnement logiciel de développement
Programmez votre robot IRM en quelques jours, pas en mois. PROMI fournit une interface logicielle ouverte pour que les ingénieurs roboticiens puissent se concentrer sur leur application — et non sur le contrôle bas-niveau des moteurs dans un environnement électromagnétique hostile. Le SDK offre un pilotage depuis PC via des frameworks standards (ROS, compatible DICOM), une API standardisée pour piloter n'importe quelle combinaison de modules, ainsi que des outils de calibration et de diagnostic intégrés.
→ En savoir plus sur notre R&DJalons du projet
Un parcours de développement structuré et orienté validation, de la technologie de base à la plateforme déployable.
Spécification de l'architecture modulaire. Exigences système. Alignement des partenaires.
Validation de la conception moteur, développement de l'électronique sans transformateur et premiers tests de compatibilité en environnement IRM.
Assemblage et tests fonctionnels du premier démonstrateur multi-DDL à l'intérieur d'un scanner IRM.
Caractérisation de la plateforme et pré-validation MR-Conditional en collaboration avec les partenaires cliniques et académiques.
Équipe projet & comité scientifique
Soutenu par
PROMI réunit des institutions académiques et cliniques de premier plan, avec le soutien de financements publics européens et régionaux.
INSERM / Univ. de Lorraine
University College London
Développement Régional
Cofinancement régional
PROMI — Actualités & avancées
Lancement de PROMI : Tekceleo pour une avancée majeure en robotique IRM
Nous sommes fiers d'annoncer le lancement de PROMI, un projet R&D majeur porté par Tekceleo et cofinancé par l'Union européenne — visant à développer la première plateforme d'actionnement standardisée et compatible IRM.
Lire l'annonce →Nous publierons régulièrement les avancées, mises à jour techniques et actualités partenaires au fil de la progression de PROMI. Suivez Tekceleo sur LinkedIn pour rester informé.
Suivre sur LinkedInRejoignez l'aventure PROMI
PROMI est bien plus qu'un projet de recherche — c'est une invitation ouverte à construire ensemble l'avenir de la robotique compatible IRM.
Utilisez la plateforme PROMI comme base validée pour accélérer vos travaux en robotique interventionnelle sous IRM.
Intégrez des actionneurs certifiés IRM-safe dans vos dispositifs. Réduisez le time-to-market et le poids de la certification grâce à une base prête à l'emploi.
Contribuez à définir les besoins cliniques, participez aux études de validation et façonnez la nouvelle génération d'interventions robotisées sous IRM.
Cofinancé par l'Union européenne — FEDER / Région Sud Provence-Alpes-Côte d'Azur.
Le projet PROMI bénéficie du soutien du Fonds Européen de Développement Régional (FEDER) et de la Région Sud PACA. Les opinions exprimées sont celles de Tekceleo et ne reflètent pas nécessairement la position officielle de l'Union européenne ou de la Région.
